
اگرچه در سال های اخیر علم روباتیک پیشرفت زیادی داشته، اما یک چالش اساسی در این زمینه نحوه حرکت و راه رفتن روباتهاست که با شیوه حرکت طبیعی انسان ها اختلاف نسبتا زیادی دارد.
به گزارش بادیجی ، محققان مدتهاست تلاش می کنند روباتهایی طراحی کنند که به شیوهای طبیعی و مشابه انسانها حرکت کنند و به عنوان مثال در صورت مواجهه با شرایط مشکوک حرکت خود را کند کنند یا به سرعت پشت سر خود را نگاه کنند.
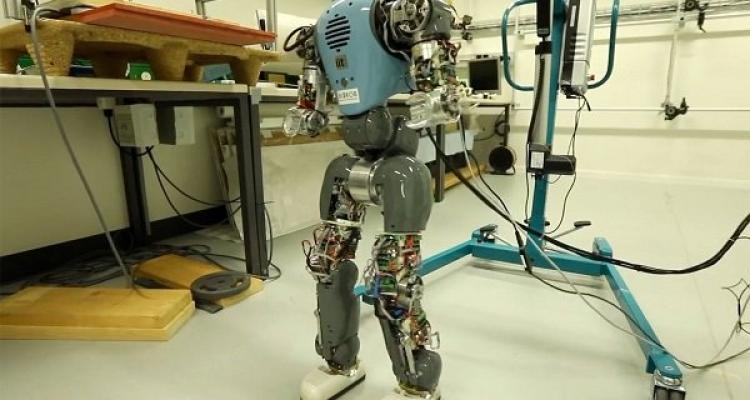
پژوهشگران سوئیسی برای اولین بار نمونه اولیه یک روبات انساننما به نام COMAN را ساخته اند که اگر چه فاقد سر است، اما می تواند با دقت و ظرافت بالایی قدم بردارد. برای تولید این روبات از مفاصل و اجزای کوچک و دقیقی استفاده شده که خاصیت کشسانی و انعطاف بالایی دارند.
همچنین الگوریتم کنترلی خاصی برای این روبات ابداع شده که باعث می شود ر,بات یادشده درک بهتری از اجزای تشکیل دهنده خود پیدا کند و بهتر بتواند آنها را مدیریت کند.
فهم بالای این ر,بات از تقارن دینامیکی و ساختار خود، نهتنها باعث قدم برداشتن طبیعی آن می شود، بلکه انجام اعمالی مانند حمل اشیا، حرکت روی سطوحی مانند پله ها و واکنش به رویدادهای غیرمنتظره را نیز طبیعی تر می کند. به عنوان مثال اگر این روبات را هل بدهید، دقیقا خواهد دانست پای خود را تا چه حد جلوتر قرار دهد تا از سقوط خود جلوگیری کند.
فرایند تکمیل این روبات و از جمله طراحی یک سر برای آن هنوز در دست انجام است و قرار است این روبات در آینده توانایی های بیشتری برای حمل انواع اشیا و محصولات پیدا کند.
انتهای پیام/




























































































































































نظرات کاربران